| �C���˵ĸ߾���ץȡ���b�� |
| ��Դ�����c������9631�Ρ����r�g��2020/5/14 16:18:38 |
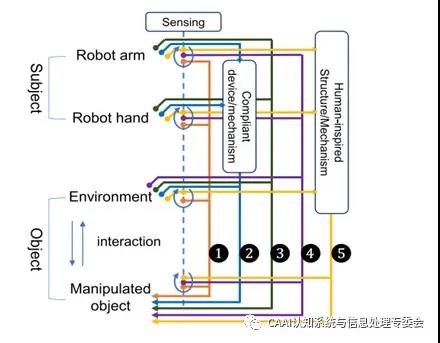
�ڸ߾��ȵ�ץȡ���b�乤���У��H�H�����Cе�ֱ����ľ��Ȳ��ܝM���΄�Ҫ������IEEE TRANSACTIONS ON MECHATRONICS �ϰl����һƪ���顶A Survey of Methods and Strategies for High-Precision RoboticGrasping and Assembly Tasks��Some New Trends��������������ڙC���˸߾���ץȡ���b�䷽����о������M���˷����ͱ��^�����U����ԓ�I����о�څ�ݡ� ���½�B�˸߾��șC���˲ٿص������:��1�����ڂ�����Ϣ�ķ�����2��������혙C���ķ�����3�����ڭh���s���ķ�����4�����ڸ�֪�s�����ɵķ�����5�������ķ�������D1��ʾ��ʾ��Dչʾ�������֮�g�IJ���ڙC���˲ٿ��У����w�ǙC���˵��ֱۺ��֣����w�ǭh���ͱ��ٿصČ���̓����ʾ������Ϣ����·��ʾ��������֪������� �B��
��1�����ڂ�����Ϣ�ķ�����2���������ԙC���ķ�����3�����ڭh���s���ķ��� ��4�����ڸ�֪�s�����ɵķ�����5�������ķ��� 1�����ڸ�֪��Ϣ�ĸ߾��șC���˲ٿط��� ���͵����ڙC���˲ٿ��΄յĂ�������Ҫ����ҕ�X�����������x����������/Ť����������D2��ʾ��
��1�����ٹ��I���C��2�����ܹ��I�z���^��3��������x������ ��4�����w���C��5���Y�����������6���w�Еr�g���C��7���P��Ť������ ��8������/Ť��������9����ָ������������10����ָ�|�X��� 1��ҕ�X������ ���ȣ�ҕ�X������������Ŀ���R�e���ˑB��Ӌ���S��Ӌ��Cҕ�X�㷨�����ڙC���˲ٿ�[1]-[7]����Σ�ҕ�X�������������ڜy���Ͷ�λ�������pĿ���Ŀҕ�Xϵ�y��ҕ��ԭ��������Ӌ���Ŀ�����w��λ�úͷ�����[8]���_�l��һ�N���ڶ�����wҕ�Xϵ�y�����wҕ�X�ָ���������Ԝy����ۙ������������w��λ�úͷ���[9]����[10]�������һ�N������֪Ŀ�����S�ˑB��Ӌ��ҕ�X�����C����ϵ�y��������Ч��ץȡ3-DĿ�ˡ�[11]���OӋ��һ���߾���ҕ�X�ŷ��b��ϵ�y��ԓϵ�y�܉������S�����c�S���b��ͬ�r�M�С��о��ˆT����ҕ�X��Ϣ�������һ�N����֧�������C(SVM)�c��Ԫ����(PCA)�ںϵą^�g��Ӌ�����㷨����������[12]Ӗ���C���˽K���\�Ӆ�����Ҏ���\��܉�E�� 2�����x������ ���x���������Ը�֪Ŀ���c�͂�����֮�g�ľ��x�����������w���ǜy������Ƭ���ǜy�����Y���⡢�w�Еr�g������y�������a���y���ȷ����@ȡ������ �����ǙC���˲ٿ��΄��г��õĎN���x�������� ��1������y�����������Կ��ٜʴ_�ث@ȡ�������cĿ��[13]֮�g�ľ��x����Ҫȱ�c�dzɱ��ߡ� ��2�����w���C��ʹ�Ã��_���C�Ĕz�D��ʹ��ƥ���㷨�����ǜy��[14]-[17]Ӌ����x������Ӳ�����s���m�У���Ӌ����s���^�����������D����������������r�²������������� ��3���Y�����������ͨ�^Ӌ����׃�Σ������w�l��ɿؽY���⣬�@ȡĿ�˅������Y����ă��c�Ǫ����ڈ�����������ƥ����y�ȡ�ȱ�c�Ƕ�������������ɔ_�������ڏ����¹����� ��4���w�Еr�g���C��ͨ�^�B�m�l���}�_���������w���صĹ⣬ӛ䛹���w�Еr�g���õ����x���c����y�����������ƣ��@�N�������������õľ��Ⱥ������Ե�����ɱ��ߡ� ���x������(�D2���DƬ3-6��ʾ)�����M��Ŀ�˜y�����ˑB��Ӌ����[18]���������w���ǜy�������F�˻����������w���C��Ŀ�����S��ģ���������һ�N�����������Д�o���������挍�h���µľֲ���ȫ�ֿ��_�ԡ� 3���������� �ڙC���˲ٿ��У���/Ť����Ϣ���V�����������㲿����Сλ���`��C���˲ٿ��г��õ������������D2���DƬ7-10��ʾ�����������S��/Ť���������|�X��������ǰ��ͨ�����b�ڙC���˵��P���������ϣ�ͨ�^�����B�Ӹ�֪���w�ϵ�����Ť�أ�������Ҫ���b�ڙCе��ָ��������ϣ��Á���֪�����Cе���ֵ��������� ��1���P��Ť�������������������b�ڙC���˵��P���ϣ��@ȡ�C�����\�ӕr��Ť����Ϣ��һ���棬�����P��Ť���R�e�C�����c���w֮�g�Ľ��|�Pϵ����һ���棬�P��Ť����Ϣ�����ڙCе�ֵ����Կ��ơ���[19]�������һ�N����ģ������C(FIM)�M���b��ķ�����ԓ�������Ը����b���^���еĽ��|��Ϣ�����Ɣ����ǰ�Ľ��|��B���о��ˆT�OӋ��һ�N�����P��Ť����Ϣ�����Կ����������P���Cе�迹δ֪����r���{��ĩ�ˈ����������ԡ�[20]��������ȿ����㷨�c������șC�����ںϣ��ڻ��ڼ����ӵęCе��ƽ�_�ό��F�˰�ȫ���˙C�������о��ˆT�����P��������Ϣ�OӋ��ƽ��ǰ����������ͨ�^�����W������[21]���F����\�ӡ� ��2������/Ť������:�c�P��Ť��������ƣ��������ȿ����ڴ_���C�����c���w֮�g�Ľ��|��B[22]��Ҳ�����ڴ_���C���˲ٿ�ϵ�y�đT�ԅ���[23]����[24]�������һ�N��������Ť����Ϣ�ʴ_�R�e��λ��/��λ���_���l���µĽ��|��B�ķ�����[25]���F��һ�N������/Ť������Ϣ�Ĝ��o�B�������������C���������^��ķ����`��r��ԓ����������Ч���{����/Ť�ء�������/Ť����Ϣ���b���^�����Ǿֲ���˲�B�ģ��о�������Ϣ�c����ȫ����Ϣ����ں���һ����һ�����Ѓrֵ�İlչ�������ƽ��ʴ_�Ժ��`����֮�g��ì��[26]���Լ���Ό��F���N���|/�ǽ��|��B֮�g����Ч�ГQ[27]Ҳ���˂����dȤ�Ć��}�� ��3�����ƺ�ָ���|�X������:���|�X���������b�����ƻ���ָ��ĩ�ˣ��@ȡ���|������������ͨ�����ڽ��|��B�R�e[28]������Ħ����Ӌ[29]��������ץȡ�^���еĻ��ƙz�y[30]�����˽�Qץȡ���}���о��ˆT��ץȡ���|ģ�����˴������A�Թ���[31]-[33]��[34]-[36]�Ќ��C����������ָץȡģ���M����һϵ���о����о���ʹ�ð��b���`�����ϵĽ��|���������߾��ȡ����ٵع�Ӌƽ�����w��λ�úͷ���[37]�OӋ��һ�N�����|�X��Ϣ���鷴��������ץȡ�ɹ��ʵ��㷨�������˹����ܷ��������|�X�������@ȡ����Ϣ��һ�Nڅ�ݡ����A��W�O�������ڈF�����Ļ��ژO�ތW���C(ELM)���|�X��֪�R�e����[38]�����⣬[39]ʹ�ñO���W���������A�yץȡ�^���аl���Ļ�����r��[40]����ҕ�X��Ϣ�������Ϣ�OӋ��һ�N�|�X�����������Ʒ����ѭ�h�W�j(RNN)���L�̕rӛ��(LSTM)�W�j��Y�ϣ����R�e��׃�κͲ���׃�����w��׃��ģʽ�� 2���������ԙC���ĸ߾��șC���˲ٿ� �ڙCе�����У����ԙC����ͨ�^�����w��׃����f���D�Q�\�ӡ��������������ԙC����ʹ����혙C�����Ԍ��F�C�����ֱۻ��ֵı��������\�ӣ��Ķ����S���@�N�\���^���������b�䲿��֮�g��λ���`����͵��b�ð����h����������(RCC)�Ϳ�׃�迹������(VIA)��
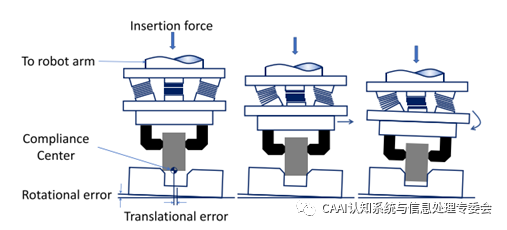
��1���h����������(RCC) RCC����Whitney��Nevins�l���ģ����ڎ����C������ɲ�����b���΄�[41]�����������о��У������V����ӑՓ�˙C���˵IJ����^��[42]���ڲ����^���У��Nᔕ����S�����D�A�����Aб���@�Q���������ġ���D3��ʾ��RCC�b�Ì��H����һ����6�����ɶȵď��ԙC�������Ը�׃ϵ�y������ĵ�λ�á���[43]���_�l��һ�N����Ӌ��C���{�迹����������ĩ�ˈ�������Ŀǰ����RCC�c�����O�����Ʒ�����Y���Ƿdz����о��rֵ���n�}��
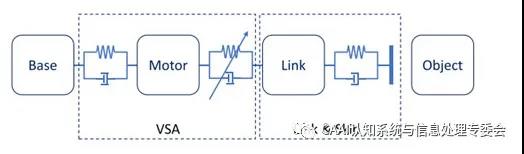
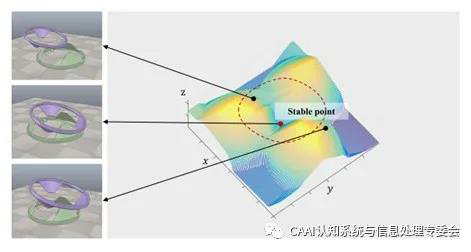
��2����׃���Ȉ��ЙC����VSA�� һ�N���͈�����VSA�����댍�F�c�h�������Խ�������D4��ʾ��Ŀǰ��[44]�����һ�N����VIAs�M���S���b��ĵͳɱ���Q������[45]�������һ�N�µ�VSA�OӋ��ԓ�OӋ���]�����\�ӈ����^���и�׃���ӄ��ȵĿ����ԣ���ˣ��ڱ��ֵ͂����L�Uˮƽ��ͬ�r�����S����ȵ��\�Ӽ��١�Ŀǰ���S��ʹ��VSAs���愂��늙C�ęC�����ֱۺ��ֵ�ԭ�������_�l[46]-[48]�� VSA���ڙC����ץȡ���b���e���ã��������������\�ӵ��������ϵ��������У��@������OӋ����������Ť�����������Կ��������y�ȡ�Ŀǰ�P��VSA��ӑՓ��Ҫ����������_���o��Ŀ�ĵ���OӋ������ 3�����ڭh���s���ĸ߾��șC���˲ٿ� ����ʹ�����ԙC�����ṩ�C���˸߾��Ȳٿ����������⣬�C�����c���ٿ،���֮�g߀���ڏV���ļs���l���������üs�������s���������@Щ�s���l�����e���ڽo��ϵ�y�еĂ�����Ϣδ֪��δ֪����r�¿��Ԟ�C�����OӋһ����Ч�IJٿز��ԣ����͵ķ��������h�������^(ARIE)�ͻ\�͡� ��1���h�������^ ARIE�ǭh���γɵļs���^�����ڙC����ϵ�y�Ę��Ϳ��g�С�ARIE�ĸ���������[49]�������[50]�Mһ��ӑՓ�������a�Ќ��F�o�������߾��ȲٿؙC���˵ĸ��ͨ�^���Ø��Ϳ��g�еĭh���s�����o�����������������������g���M�и߾����b�䣨��Ҋ�D5����
���s����Ľ��|��B �ң�ARIE�е������c ����ԓ��Փ��Ŀǰ����˶����߾��ȵęC���˲ٿ��΄ա����磬����܇����I�����û���ARIE�ķ����OӋ��һ�Nƫ�ĵğoᔿׂ������M�bϵ�y[51]���о��ˆT߀�_�l��һ�N����ҕ�X�����SץȡҎ���������H��Ҫһ��[52]�D����������о��У�[53]���HӑՓ��ARIE�Ķ��x�͏V�x�l�����o����ARIE��һ�㔵�W�������������ڲ�ͬ���Ϳ��g��ARIE���ڵėl�����������cӑՓ�˸ߡ��;S���g��ARIE���Pϵ�� ��2���\�� ����\�͆��}�Ǟ����ҵ�һ�M��ָ�ķ����c��ԓ��ָ�ķ��ÿ��Է�ֹ��߅�������Ƅ��h�x��o��λ��[54]���\����Փ���ԑ����ڙC����ץȡ�I��[55]�о��˻\�͘����cץȡ����֮�g���Pϵ��[56]��ץ�յĹ����Uչ���˻\�Σ�ʹ�������Π�������`���ֵľS�ȣ�߀���ÿ��gӳ����Ч�y���˻\�͵������ԡ�[57]-[59]�����һ�N����ҕ�X�Ĺ��I�A�����Ļ\��ץȡ�㷨��[60]�Y���˻\ʽץȡ�͏����]��ץȡ�ă��c��ʹ��ͬ��ץȡ���܉����ץȡδ֪��ƽ�����w����[61]�������һ�N���K�����l�Ļ\ʽץ�շ��������Ա��C�ֲ�����ץ�ա� 4�����ڸ�֪�s�����ɵĸ߾��șC���˲ٿ� �IJ�ͬ�Ŀ��g����֪��Ϣ�ͭh���s�����ɵ�һ���yһ�Ŀ���У�����h���s���^��(CRIE)���CRIE�Ѓɂ���������: ���h���s����������ʾ��һЩ��B�������������[����������z�yϵ�y�Į�ǰ��B�����ڂ�����Ϣ����������������挍����֮�g�IJ���������������һ���e�`�z�y����[62]ͨ�^�������ֵĽ��ʽY��������ƙC�Ɓ�̽ӑ�C�����ֵ�����ԡ�[63]�����һ�N���Эh���s���^������ԙC����ץȡ���ԣ�ԓ���Կ��Ը������ƵĽ��|�������{��ץȡ���͡� ���ˌ�������Ϣ�c�h���s���Y����һ�����g֮�⣬߀���Բ�ȡ������Ϣ���h���s������h���s����������Ϣ���M���a���ķ�ʽ��[64]�����һ�N�C��ץȡ���}�Ľ�Q������ԓ�����ڝM�����б�Ҫ�s���l������r�£����Ԟ��ض����΄��ҵ�ץȡ�o���������֘��͡�[65]�о���һ�N���ֺ�������ץȡ�������|���Ľ�ģ������[66]�о��������ΛQ���ٿ�δ֪���w�����ץȡ�����Ķ������ץȡ���w�IJ��ԑ��õ��C����ϵ�y�С� 5�������ķ��� ���ֵ��`���Կ��Ԍ��F�߾��ȵIJ���������о����ֵĽY���Ϳ��ƙC�ƿ��Ը��M�F�ЙC����ϵ�y���OӋ����ߙC���˲ٿص�����ԡ���������˃��c�� ��1���C����ĩ�ˈ��������������Y��:Ŀǰ��������C���˵��ֱۺ��ֶ������˽�����ƣ�Ȼ�����ֲ��\�������S���g�и��\��λ�õįB�ӣ��\���`���Ǹ�늙C�`��įB�ӡ�����C���˵�ĩ�ˈ������܉����m���ķ�ʽ���F��Ϻ�����Y�����t����ʹ�\�Ӹ�����혡� һЩ�о����OӋ�˾��м���Y�������͙C�����֣�������δ֪�h���¸����cĿ���M�н�������[67]�������һ���������༡���ӺͶ�߅�s���ęC���˲ٿ�ϵ�y��ģ��ͨ�ÿ�ܡ���[68]�н�B��һ�N�ɼ�������ָ�ķ����C�����֡���[69]�������һ�N���ڼ����ӵęCе�փ���������ԓ�������ԃ��������ӽY�����OӋ���ԫ@�����ij��d���� ��2�����Կ��Ʋ���:ͨ�^�����ֱۺ��ֵ��������Y�����W��ͨ�^���Կ��Ʋ��Ԍ��F�߾��ȵIJٿء�����ӑՓ�˃ɷN��Ҫ�Ŀ��Ʋ��ԡ� ����1:ϵ�y��Ҫ�����˽��ֱۡ�������ֵľ��_�̶ȡ�ͨ�^����ָ���m�����ƣ����ֱۺ�������\���`���M���a���� ����2: ��W����������Ҫ�ǻ��ڽ�����������Y���ڙCе���ό��F��������������W�j��ͨ�^�����W�����D�ƌW���팍�F���Կ��Ʋ��ԡ� 6�����Y ��ٿظ߾��șC���˵ķ�����ÿ�N���������c��D6��ʾ��Ŀǰ�����߾��șC���˿��Ƶ��о��Լ����ڻ��ڂ�������Ϣ�ķ����ϡ�����Ť����Ϣ���^�͌ӴεĿ��Ʒ������F��������Ҫ���ã�����ҕ�X�;��x����Ϣ�������^�ߌӴε��R�e���y���͌W���аl�]����Ҫ�����á�һ����f���@Щ�����ľ�����Ҫȡ�Q�����Â������ľ��ȣ���ˣ����������ĸ��M�кܶ��о�����Ҫ���� 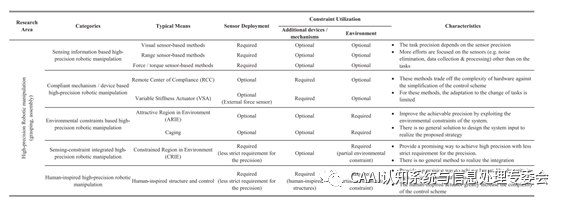 �D6 �����Â������ͼs������ÿ�N���������c �������ԙC���ķ����ǽ�Q�C���˸߾����S���b�䆖�}�Ľ��䷽ʽ��RCC�O���˜ʵ��S���b���΄��ṩ��һ�N���õĽ�Q��������VSAͨ�^�����әC�ƣ��錍�F����\���ṩ����һ�N���ܷ�ʽ���û��ڭh���s���ķ����팍�F�߾��șC���˵Ŀ�����һ�N��˼·���@�N�������òٿ��^���еă�����Ϣ���������~����Ϣ�ĸɔ_����֪�s�����ɷ����ͷ�������Ҳ�ṩ�ˌ��F����`�ɲٿ�ϵ�y�Ŀ����ԣ��dz������о��rֵ��δ�������������������������о��ărֵ���������û��ڌW���IJٿط�������ߙC����ϵ�y�����ܣ��ø�֪�s�����ɷ������p�ٙC����ϵ�y���߾��Ȃ�����Ϣ����ه���÷����ķ����������C����ϵ�y������ԡ� |
| ��ˢ����桿�������ղء�����ӡ���ġ� ���P�]���ڡ� |
| ��һƪ���m��Ƽ�-12N.m����ֱ��늙C�yԇ�_���Ŝ��y���C���l����������һƪ���m��Ƽ�-����늙C�yԇ�_����ؓ�d�O���؛�l���� |